|
并联机器人具有运动部件质量小、定位精度高、结构刚度大等优点,广泛应用于电子制造、食品加工、物流仓储等领域。现有四自由度并联机器人,仍存在着工作空间小、高速运动下定位精度低、机器人操作复杂等缺点,限制了在高端制造业中的推广应用。团队在并联机器人构型设计、误差补偿、控制策略开展了系统性研究,设计了一种新型高速高精四自由度并联机器人,并开发了集成视觉定位模块的并联机器人控制系统,可有效解决3C装配、上下物料、包装和分拣等行业对高速高精并联机器人的强劲需求。项目取得的成果如下:
设计了结构对称、基于单动平台的3T1R四自由度并联机器人,完成正逆运动学建模和奇异性分析,通过尺寸优化研究,机器人工作空间提高了16%。
研究了基于矢量法的3T1R并联机器人的运动学标定技术,通过集成所有分支链的运动约束,消除被动关节角的影响,机器人末端动平台的位置和姿态精度分别提高了98.183%和88.867%。
设计了双目相机定位系统,通过相机选型和工装设计完成了定位平台搭建,并取得误差小于0.06像素的超高标定精度。基于HIK SDK和OpenCV开发了视觉定位软件,对距离850mm左右物体的相对定位误差小于0.22%。
开发了并联机器人控制软件,针对不同用户需求和应用场景,定制化设计操作模式,简化了机器人操作流程。机器人程序封装成SDK,便于对本项目进行二次开发。

新型高速高精四自由度并联机器人
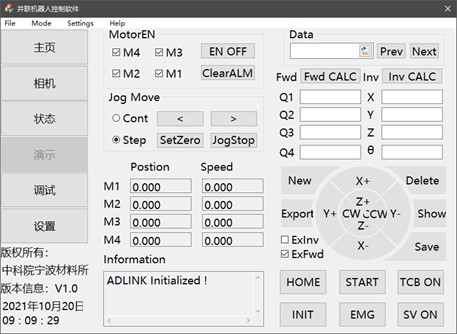
并联机器人控制软件
|




