|
机器人磨抛作业属于连续接触式加工,在磨抛过程中不仅要对机器人进行精确的位置控制,还要进行接触力控制,以提高加工精度。目前工业机器人进行力控制的方法主要有两种,即通过控制机器人关节力矩的直接力控法和利用机器人外部附加装置的间接力控法。前者需要建立准确的机器人动力学模型,并且机器人的大惯性会影响力控的动态响应速度和精度。后者可通过增加一个具有力控制功能的末端执行装置,与机器人通过宏微协调实现精准的力控制,其具有动态响应速度快、精度高、灵活性好等优点,已成为磨抛机器人力控的重要发展趋势。
实验室在国家重点研发计划“智能机器人”专项的支持下,研发了三款力控末端执行器,包括单自由度力控末端执行器、2R1T三自由度力控末端执行器和3T三自由度力控末端执行器,其特点及主要性能参数如下:
(1)三款力控末端执行器均采用氮气弹簧与音圈电机并联的气电混合驱动,同时具有氮气弹簧输出力大、柔性好,音圈电机控制精度高和响应快的优点;采用拉伸弹簧,提高系统刚度;
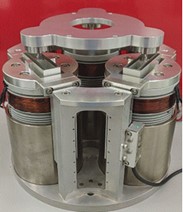
(2)2R1T力控末端执行器采用3-PPS并联机构,3T力控末端执行器采用3-P(2-UU)并联机构,均具有结构紧凑、刚度高等特点;
(3)单自由度力控末端执行器力控范围为0~100N,力控精度优于2N,响应时间50ms以内,重复定位精度优于25um,行程20mm,适合大曲面表面磨抛;
(4)2R1T力控末端执行器力控范围为0~275N,力控精度优于3N,响应时间50ms以内,重复定位精度优于30um,适合复杂曲面表面磨抛;
(5)3T力控末端执行器力控范围为0~275N,力控精度优于3N,响应时间50ms以内,重复定位精度优于30um,适合上表面及侧面磨抛;

单自由度力控末端执行器
2R1T力控末端执行器

3T力控末端执行器

|



